Ros
ROS
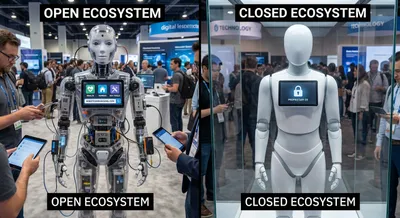
Open vs Closed Ecosystems: Extensibility and Third-Party Apps on 2026 Humanoids
This article compares open vs closed platforms in 2026 humanoids. We look at API access, plug-in frameworks, hardware interfaces, and simulation...
Ros
ROS stands for Robot Operating System, but it is not a traditional operating system like Windows or Linux. It is a collection of software libraries and tools that help developers build, run, and test robots more easily. Instead of forcing one big program, it breaks robot software into smaller programs called nodes that communicate with each other using message channels. It also includes ready-made drivers, simulation tools, visualization utilities, and ways to record and replay data, so teams do not have to build everything from scratch. Because it is open source and widely used, many people contribute reusable packages and examples. This makes it much faster to prototype ideas, share work, and combine hardware and software from different vendors. Newer versions added features for real-time control, better security, and support for more kinds of devices so it can be used in research labs and in commercial products. There are trade-offs: learning its conventions takes time, some packages are only available for certain versions, and running all features can be heavy on small computers. Still, it has become a common foundation for modern robotics because it encourages reuse and collaboration. For anyone curious about building robots, learning it unlocks a large ecosystem of tools and community support.
Never Miss a Robot Breakdown
Get deep research, head-to-head robot comparisons, and industry analysis delivered straight to your inbox — multiple times a week, completely free.