Robot simulation
robot simulation
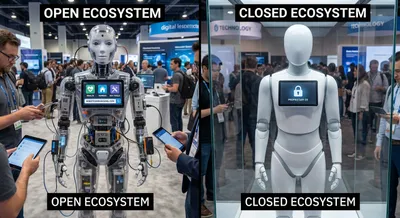
Ecosistemas abiertos vs. cerrados: Extensibilidad y aplicaciones de terceros en humanoides de 2026
Este artículo compara las plataformas abiertas y cerradas en humanoides de 2026. Analizamos el acceso a la API, los marcos de complementos, las...
Robot simulation
La simulación de robots consiste en recrear, dentro de un ordenador, cómo se movería y comportaría un robot en el mundo real. Se modelan formas, sensores, actuadores y el entorno físico para probar programas sin necesidad de piezas reales. Esto permite verificar algoritmos de control, navegación y percepción antes de gastar tiempo y dinero en prototipos. Las simulaciones pueden ser muy simples, con modelos básicos, o muy detalladas, incluyendo fricción, colisiones y ruido de sensores. Para estudiantes y equipos de investigación son una herramienta valiosa porque aceleran el aprendizaje y permiten experimentar con seguridad. También ayudan a detectar errores peligrosos que podrían dañar el robot o el entorno si se probaran directamente. La razón por la que importa es que reduce costes y riesgos en el desarrollo robótico. Probar en simulación abre la puerta a iteraciones rápidas y a explorar escenarios extremos que serían difíciles o peligrosos de recrear físicamente. Además facilita la colaboración: varios desarrolladores pueden trabajar sobre el mismo entorno virtual desde diferentes lugares. Aun así, hay que tener en cuenta que una simulación perfecta no existe; siempre habrá diferencias con la realidad, por lo que es importante complementar con pruebas físicas antes del despliegue final.
Nunca te pierdas un análisis de robots
Recibe investigación profunda, comparativas directas de robots y análisis de la industria directamente en tu bandeja de entrada — varias veces a la semana, completamente gratis.