Ros
ROS
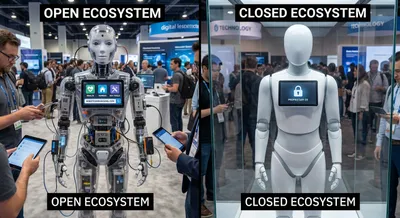
Ecosistemas abiertos vs. cerrados: Extensibilidad y aplicaciones de terceros en humanoides de 2026
Este artículo compara las plataformas abiertas y cerradas en humanoides de 2026. Analizamos el acceso a la API, los marcos de complementos, las...
Ros
ROS significa Robot Operating System y es un conjunto de herramientas y bibliotecas que facilita crear software para robots. No es un sistema operativo en el sentido clásico, sino una capa de software que ayuda a comunicar y coordinar distintos componentes. En ROS, los programas se organizan en módulos que intercambian mensajes, servicios y datos para trabajar juntos. Esta estructura modular permite reutilizar código, probar partes por separado y combinar sensores, actuadores y algoritmos con menos esfuerzo. Viene con utilidades para simular robots, visualizar datos y registrar información de forma estandarizada. Una gran ventaja de ROS es su comunidad: existen muchos paquetes listos para usar que aceleran el desarrollo y fomentan buenas prácticas. También facilita la colaboración entre equipos y la portabilidad del software entre diferentes plataformas robóticas. Sin embargo, aprender a usarlo correctamente requiere tiempo, y hay que prestar atención a la seguridad y al rendimiento en aplicaciones críticas. Existen varias versiones con distinta madurez y compatibilidad, por lo que es importante elegir la que mejor se adapte al proyecto. En conjunto, ROS ayuda a reducir la complejidad técnica y a acelerar la creación de robots funcionales y extensibles.
Nunca te pierdas un análisis de robots
Recibe investigación profunda, comparativas directas de robots y análisis de la industria directamente en tu bandeja de entrada — varias veces a la semana, completamente gratis.