robot simulation
robot simulation
모든 기사AI in industryAI 로봇 공학AI 통합API roboticsautomation costautomation pitfallsBoston Dynamics AtlasCAPEX vs OPEXCCPACE markingCE 마크change managementclosed systemsFCC 준수GDPRhealthcare roboticshumanoid robotsinternational shippingISO 10218logistics automationmanufacturing automationopen source roboticsOSHAretail technologyrobot depreciationrobot insurancerobot integrationrobot leasingrobot maintainabilityrobot maintenancerobot securityrobot simulationrobot trainingrobotics adoptionrobotics ecosystemrobotics import regulationsROI roboticsROSsupply chainTesla Optimusthird-party appstotal cost of ownershiptrade compliancevendor lock-inWEEE directive강화 학습규정 준수그리퍼기업 로봇 공학데이터 프라이버시도메인 무작위화디지털 트윈디지트 로봇로봇로봇 규제로봇 비교로봇 안전로봇 인증로봇 테스트로봇 플랫폼로봇 학습머신러닝보스턴 다이내믹스 아틀라스산업 자동화생츄어리 피닉스시뮬레이션시뮬레이션-실제 전이아폴로 로봇어질리티 디지트유니트리 H1유연한 객체자동화정교한 조작 능력조립 작업직장 안전촉각 피드백컴플라이언스 제어테슬라 옵티머스텔레오퍼레이션푸리에 GR-1피겨 AI협동 로봇훈련 데이터휴머노이드 로봇
주제를 찾을 수 없습니다
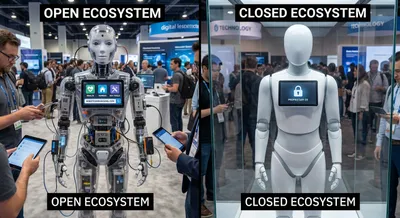
오픈 대 클로즈드 생태계: 2026년 휴머노이드 로봇의 확장성과 서드파티 앱
이 글에서는 2026년 휴머노이드 로봇의 오픈 플랫폼과 클로즈드 플랫폼을 비교합니다. API 접근, 플러그인 프레임워크, 하드웨어 인터페이스 및 시뮬레이션 지원을 살펴봅니다. 또한 각 플랫폼의 앱 수와 커뮤니티 지원 정도, 그리고 기업들이 미래 업데이트에 대해 어떤...
2026년 6월 9일
robot simulation
로봇 시뮬레이션은 실제 로봇을 바로 쓰지 않고 컴퓨터 안에서 가상 환경을 만들어 로봇의 동작을 시험하는 방법입니다. 물리 엔진이 중력, 마찰, 충돌 같은 현실 세계의 법칙을 흉내 내고 가상 센서를 통해 카메라나 라이다 신호를 모사합니다. 이를 통해 알고리즘을 반복해서 테스트하고 성능을 빠르게 개선할 수 있어 비용과 위험을 크게 줄여줍니다. 특히 고장 위험이 있거나 위험한 환경에서의 테스트를 안전하게 수행할 수 있습니다. 또한 머신러닝 모델을 대량으로 학습시키는 데 시뮬레이션은 필수적이며, 클라우드 기반으로 확장하면 더 많은 실험을 동시에 돌릴 수 있습니다. 다만 시뮬레이션과 현실 사이의 차이(시뮬-투-리얼 갭)를 줄이는 작업이 필요하므로 현실 데이터로 보정하거나 하이브리드 테스트를 병행합니다. 시각화 도구는 개발자가 로봇의 행동을 이해하고 디버깅하는 데 큰 도움을 줍니다. 결국 시뮬레이션은 빠른 개발, 안전한 시험, 비용 절감에 중요한 역할을 하며 실제 배포 전 필수 단계로 자리잡고 있습니다.
로봇 분석을 절대 놓치지 마세요
심층 연구, 로봇 직접 비교, 산업 분석을 매주 여러 번, 완전히 무료로 받은편지함으로 직접 받아보세요.